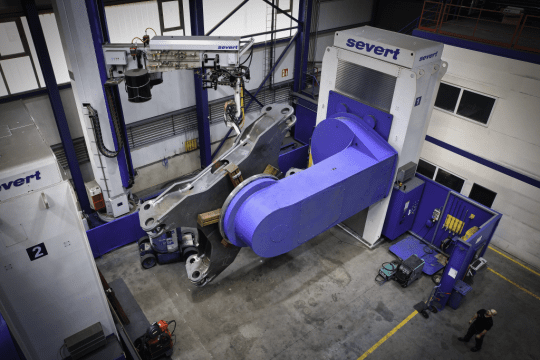
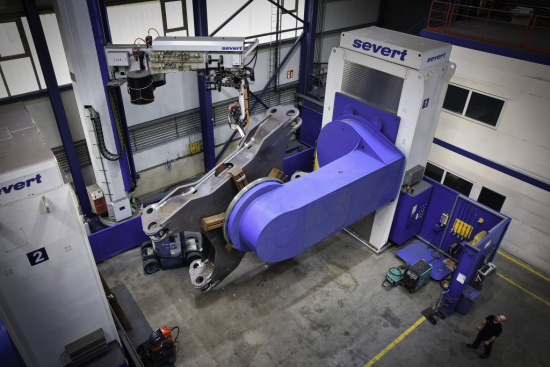
This new plant was initially designed for our own production. The welding system for large components consists of two workstations. Each of these stations is equipped with a turning and reversing positioner, which enables flexible positioning of the welded components via three axes. These can each be used to move components weighing up to 45 tons.
Watch the corresponding Youtube-Video
The plant is equipped with two ABB 6-axis welding robots, each mounted on a gantry. Each of these robots is very mobile and can easily reach large-volume components. The gantry lifts and swivels the robot and also moves over a traverse carriage. The maximum travel distance in this configuration is currently 20 meters. A total of twelve drive axes ensure an optimum welding position.
In automatic mode, the robot controller also controls the axes of the positioning system. However, not all seams of a component can usually be welded by the robot, for example if they are difficult to access. For this reason, the positioner can also be controlled manually. Even then, the robot controller remains informed about the current position. In manual mode, the positioner is controlled by the latest MOVI-C inverter generation from SEW Eurodrive. This means that it is possible to switch between manual and robot operation at any time and continue working seamlessly without having to move to a reference point each time.
For a perfect welding result, we rely on components from Fronius for this robotic welding system. A TPSi 600 TWIN welding system is used, including an automatic torch neck changing system and torch cleaning stations for single-wire and TWIN torches. An intermediate layer cleaning system has also been integrated. This means that seam cleaning can be carried out fully automatically by robot.
For optical seam finding, as well as for seam tracking, the PowerCam from Servo-Robot is used. This helps to compensate for inaccuracies in workpiece fitting and to achieve the desired welding speed and quality. Furthermore, an arc sensor for seam tracking and a gas nozzle sensor for tactile position search were included.
The components can be preheated with a preheating system. The component preheating unit used, with an oxyfuel preheating torch from Messer Cutting, can be picked up by the robot by means of a changing system. In this way, the components can be preheated automatically.